The IR sensor is used to sense if there is some sort of obstacle in its line of sight. It does that by sending an IR (infrared) light from the transmitter end, which isn’t visible to the normal eyes, and then, if there’s some sort of obstacle, then the light is reflected back and is detected by the receiver. The sending process is continuous and as soon as the obstacle is detected, we can use it to perform our required output. The Detection Range of an IR sensor is 2 to 20cm & the Detection Angle is 30° to 40°
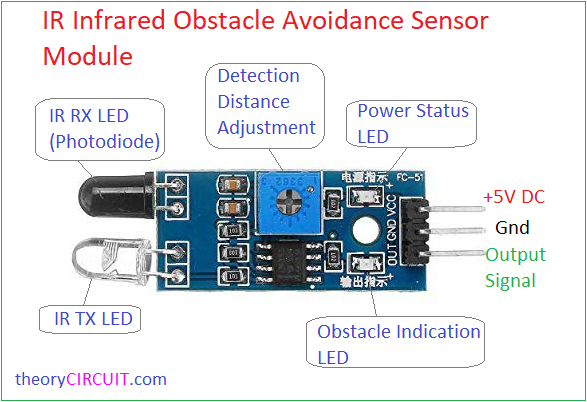
A IR obstacle avoider sensor contains:-
1. Transmitter LED
2. Receiver LED
3. Detection distance adjuster
4. Power LED
5. Obstacle detection LED
6. Pins (power, ground, output)
How to use
Step by step tutorial – (https://youtu.be/V5GdLjBmi2o)
YouTube Video
Common Applications
1. In obstacle avoider robots.
2. In aids for visually impaired.
Some example projects that students can try out in the ATL Lab
1. Design an Object Counter using IR sensor and Arduino –
https://www.youtube.com/watch?v=zmwq6TWZi0E
2. Automatic Door Opener –
https://www.youtube.com/watch?v=HuIppQPLuPs
Safety Measures to follow
1. Avoid using or storing the sensor under direct sunlight.
2. Avoid using it in regions with chemical or gaseous exposures.
Important Links
1. How to use a IR sensor with Arduino –
https://www.youtube.com/watch?v=tUTr58fq308
2. Working of an IR sensor –
https://www.youtube.com/watch?v=zq51oZMzyP0